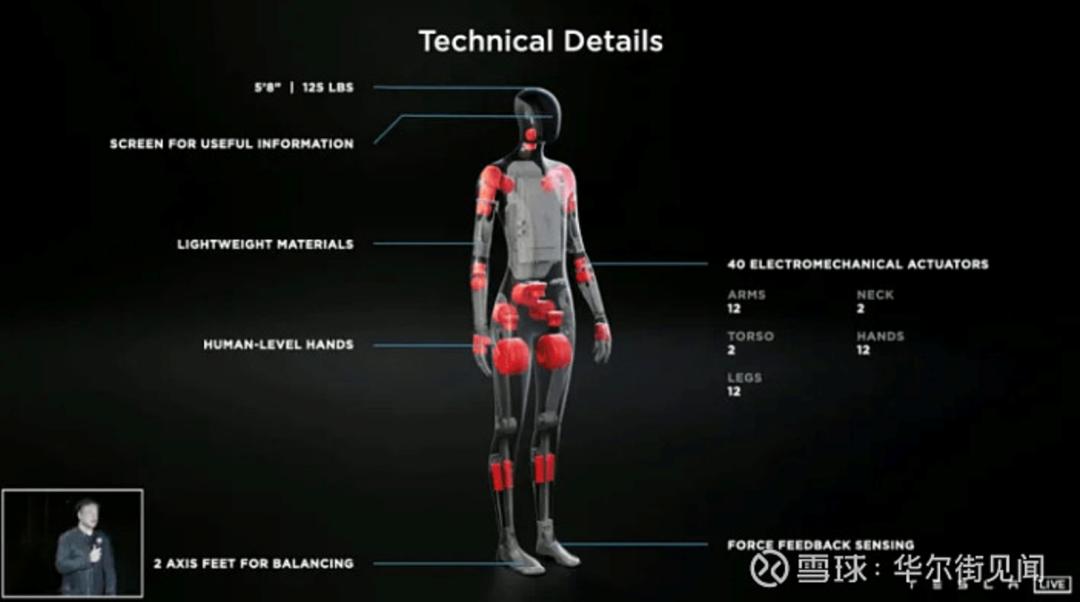
这款人形机器人身高1.72米,体重56公斤,类似一位普通成年男性,可以8km/h速度运动,面部有一个重要作为感知入口,内置F,同时具有一颗只读芯片确保安全,同时机器人具备人机协作的特点确保足够柔性和安全。
按照发布会定义,这款机器人将从事一些危险、重复或无聊的工作。马斯克表示,特斯拉未来的人形机器人Optimus是2022年最重要的产品研究开发项目,甚至有可能比汽车业务更重要。
6月20日,中国国际发展知识中心发布了首期《全球发展报告》。报告数据显示,估计2020年至2025年间,全球约8500万工作岗位将被机器替代。这份《全球发展报告》指出,自动化的生产线、智能化的机器人等将代替大量从事重复性、机械性工作的劳动者,可能引发大规模的传统劳动密集型职业岗位消失。其实,显而易见这是技术进步带来的必然结果。
东莞证券觉得,工业机器人累计产量增速停止下滑趋势,5月累计产量增速有所回升,预计2022年工业机器人累计产量将在中低速稳定增长,建议关注上游细致划分领域。在下游刚需的驱动下,2022年工业机器人行业的旺季有望后置,行业将出现恢复性增长。自动化的生产线、智能化的机器人等将代替大量从事重复性、机械性工作。
·1988~1995年间,国防科技大学先后研制成功平面型六自由度双足机器人KDW-I、空间运动型机器人KDW-II和KDW-III。
·2000年11月29日,国防科技大学又研制出我国第一台人类双足步行机器人“先行者”
·1999年,上海交通大学研制仿人机器人SFHR(腿部和手臂分别有12个自由度和10个自由度,身上有2个自由度,一共24个自由度)
·2002年12月,北京理工大学研制出仿人机器人BRH-1。此后,又在此基础上研制成了“汇童”机器人
·2002年,清华大学研制出具有自主知识产权的仿人机器人THBIP-I。(32个自由度)
目前看,机器人用途非常广,例如一旦行业成熟,一些只能人工来工作的流水线,可以机器人替代;在家庭中可以是玩伴,保姆,家教,还可以成为一个管家;美的集团9日发布其首款家庭服务机器人,计划今年下半年在国内市场量产上市!机器人在工业领域,服务领域都有很大的需求;人形机器人双臂更像人类,符合比如装配、搬运、家务等复杂场景的使用;而双足的通过性要强于轮式;设计的冗余通过工程和量产去做成本方面的平衡;相对于庞大的人形机器人,大象机器人的双臂人形机器人用起来如人手般灵活,双臂人形机器人轻量化部署便利,将传统机器人从大块头变成轻量级,提高操作的安全性。
大象机器人是一家专注于机器人研发生产、平台软件开发及人机一体化智能系统服务的中国新高科技公司。面对国产机器人行业的机遇与挑战,将工业机械臂技术延伸到协作机器人的领域,把「安全性」和「人机交互性」的特点凸显出来,在积累了一定的轻工业行业案例后,专门针对教研场景进行技术优化。6月16日消息,大象机器人官微宣布,将于7月发布新品,推出双臂人形机器人,并且凭借优异的品质与性价比将「国产双臂人形机器人」推向全球。
官方预热显示,大象机器人发布的新品是一种新形态,也是双臂人形机器人新超越。目前,大象机器人官方尚未透露即将发布新品的更多信息,不过,大象官方新品发布主题为“双臂人形机器人新边界”,预计本次将发布的新品为面向高校人工智能机器人应用解决方案,感兴趣的朋友到时能关注官方的新品发布信息。
系列共有三款产品:水星Mercury A1 七轴协作机械臂和水星Mercury B1半
系列 /
“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
通过OpenAtom OpenHarmony(以下简称“OpenHarmony”)3.2 Release版本兼容性测评并获颁兼容性证书 。这体现了
推出重磅关节模组 /
,大众对他的理解,往往还存在于科幻影片中,无论是《变形金刚》、《终结者》、《机械战警》等汇聚很多材料、各种类型的
的品牌出现,价格也非常低廉,甚至达到了成本价附近,为了打开市场开始打价格战,其实
落地的解题方法 /
越来越受到大家的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被大范围的应用于儿童陪护
的清洁效率和便携性。能点科技光电液位传感器灵敏度较高,主要供应液位开关,倾倒开关,小型流量计,分离式液位开关,
AMD Versal AI Edge自适应计算加速平台之PL通过NoC读写DDR4实验(4)
AMD Versal AI Edge自适应计算加速平台之PL LED实验(3)
使用Altera Interface Planner高效设计FPGA引脚布局
I.MX6ULL-飞凌 ElfBoard ELF1板卡- 移植zbar的方法
